
In many applications, the LIN bus is used together with the CAN bus. The LIN bus is used to connect various sensors and transducers and is connected to the control unit. From this ECU, the information from these LIN sensors is then transmitted via the CAN bus. In order to simplify the work with the LIN bus, especially for the development of sensors or their simulation or scanning of the LIN bus, we have prepared our new USB2LIN converter. This converter has the following features:
- 2x LIN bus
- 1x CAN bus 2.0 high speed
- Marker input
- integrated 5V/12V DC/DC converter for powering LIN peripherals
- integrated into the PP2CAN software
- support in X2CAN API
- LIN bus / CAN bus gateway using PP2CAN software

|
|
Pinout | |
| 1 | CAN1 low | |
| 2 | CAN1 high | |
| 3 | GND | |
| 4 | LIN1 | |
| 5 | LIN2 | |
| 6 | Trigger/marker | |
| 7 | 12V | |
| 8 | GND | |
| LED | ||
| 1 | Power | |
| 2 | CAN1 Green-activity / Red-Error | |
| 3 | LIN1 Green-activity / Red-Error | |
| 4 | LIN2 Green-activity / Red-Error | |

Each LIN interface of the USB2LIN converter operates in one of 3 possible modes:
Master - emulation of the LIN master, so you can test communication with LIN bus peripherals, for example.
Slave - emulation of LIN slave devices, i.e. easy emulation of slave devices during master development
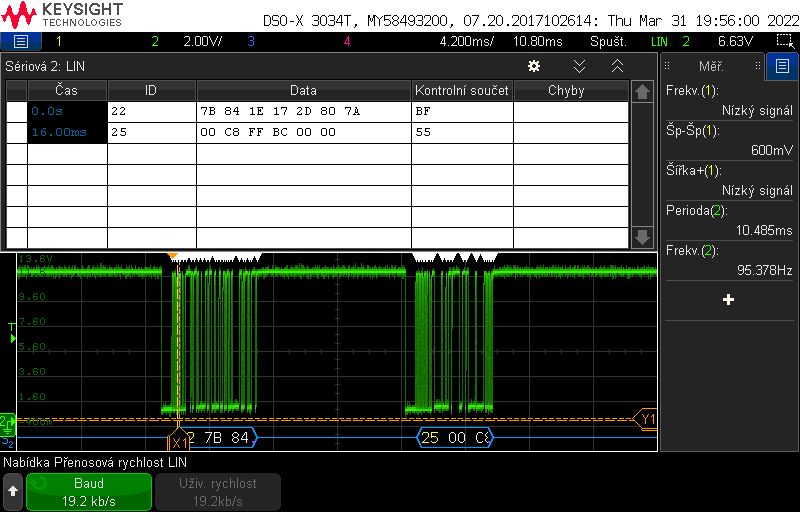
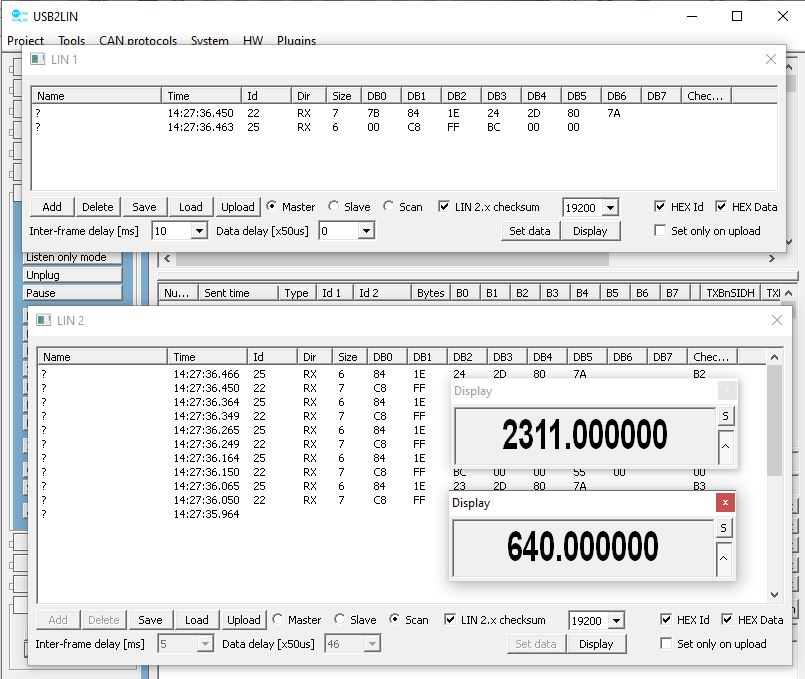
Scan - reading LIN bus communication - for example for independent monitoring of LIN bus data or decoding the LIN sensor communication protocol
Of course, the older LIN protocol version 1.3 as well as version 2.x and various speeds are supported.
More information: