
Pokud chcete pracovat s CAN sběrnicí, máte několik možností, zakoupíte profesionální řešení se software v řádu tisíců až desetitisíců euro s licencí na rok, nebo použijete levný převodník, ke kterému dostanete jednoduchý program pro logování, zobrazení zpráv a možností zprávy ručně odesílat. Náš program PP2CAN sice nelze srovnávat se software za tisíce euro, nicméně nabízí mnohem více něž drtivá většina programů k levným CAN bus převodníkům. Navíc je k dispozici k naším převodníkům zdarma (včetně pravidelných aktualizací) bez nutnosti platit roční licenci a není svázán s konkrétním počítačem.
Program PP2CAN obsahuje spoustu nástrojů jak generovat nebo zobrazovat data. V tomto přehledu si popíšeme jaký nástroj v které situaci je nejlepší použít.
Sync
Nástroj je určen k periodickému generování dat. Generování je ovšem řešeno softwarově. Pokud však je třeba generovat nějaké přesné synchronizační zprávy, je vhodnější použít nástroj HW Sync. Předností základního nástroje Sync je možnost nejen periodického generování dat ale i balíčku stejné zprávy. To je v praxi dobře použitelné pokud chceme generovat velké zatížení na CAN například v situacích kdy si chceme ověřit zda váš hardware je schopen přijmout všechna data z CAN sběrnice. K tomu je dobré použít i funkci Test seq., která v prvním datovém bajtu u balíčků 100x a 120x generuje sekvenční číslo zprávy.
HW Sync
Tento nástroj s převodníkem USB2CAN a patřičným firmware nebo převodníkem USB2CAN Triple/Combo generuje zprávy s velmi přesným časováním. Nastavení lze zkombinovat s nástrojem Data sender nebo Bit sender a generovat s přesnou periodou proměnná data. Taktéž je možné využít funkce automatického výpočtu checksumů.
Data sender
Pokud je třeba generovat na CAN bus zprávu ve které je třeba měnit data a to buď manuálně nebo automaticky podle přednastavených průběhů, je pro to vhodný tento nástroj. Data se generují periodicky a nebo při změně.
Bit sender
Obdoba předchozího, ovšem na bitové úrovni.
ASCII sender
V případech kdy například CAN protokol je zapouzdřením ASCII příkazů, nebo zprávy obsahují ASCII data, lze pro generování použít tento nástroj.
File sender
Pokud je třeba přehrávat zachycená data z CANu - log / trace, je možné záznamy přehrávat tímto nástrojem. Log je možné přehrávat bud rychlostí počet zpráv za daná čas, nebo v režimu realtime a to skutečnou rychlostí, zrychleně nebo naopak zpomaleně. Lze také pomocí filtru nastavit která zprávy (identifikátory) se odesílají a které ne.
Signal sender
Podobá se nástroji Data sender avšak dovoluje průběh dat, tedy jednotlivé hodnoty nastavit ručně. Taktéž dovoluje používat i jiné datové délky, například 5 bitová data a specifikovat pozici dat v CAN zprávě po bitu. Další užitečnou vlastností je možnost generovat až 4 různé průběhy dat v jedné CANové zprávě.
Data generátor
Pomocí EYE (nebo DBC souboru překonvertovaného do EYE) je možné generovat na CAN data a zde jen nastavovat hodnoty jednotlivých veličin.
Enable
Dialog, který se otevře po stisku tohoto tlačítka je určen k současnému povolení běhu několika nástrojů. Například k současnému spuštění otevřených Data a Bit senderů.
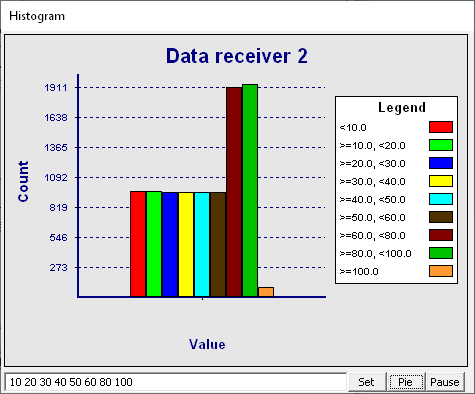
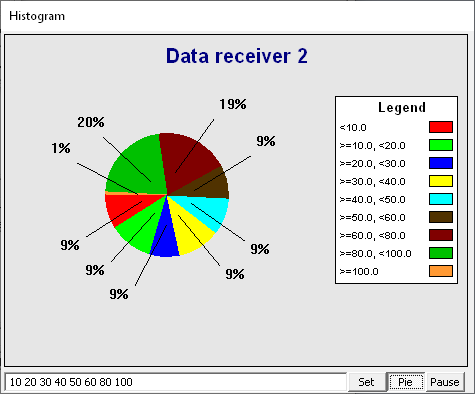
Data receiver
Jedná se o starší nástroj pro zobrazení dat v zadané CAN zprávě. V současnosti již program PP2CAN obsahuje vhodnější a efektivnější nástroje. Nicméně obsahuje nástroj Histogram kterým se dá získat rychlý přehled o rozdělení jednotlivých hodnot nějaké veličiny.
 |
 |
Bit receiver
Opak Bit senderu, dovoluje vizuálně zobrazit stavy a změny bitů v CAN zprávě.
Multi receiver
Data receiver, bit receiver pro všechny datové bajty v jednom.....
ASCII receiver
Opak ASCII senderu, rychle zobrazuje ASCII znaky v CAN zprávě.
ID Trap
Starší nástroj který dovoluje získat přehled o tom které datové bajty se ve zprávách mění, jaké délky dat a druhy zpráv (data/rtr) se na CANu vyskytují. V současnosti většinu funkce zastane nástroj Grid log.
Display
Nástroj pro zobrazení dat, například provozních veličin které chceme sledovat na pozadí při práci.
Table reader
Vyčítání indexovaných dat do tabulky (například obsah paměti) ale i jejich zápis. Definuje se zpráva pro čtení a tvar odpovědi, délka a pozice adresy - indexu dat a velikost a pozice hodnoty v odpovědi.
Graph
Zobrazení zadaných zpráv v Grafu. Efektivnější je použití nástroje Data view nebo Signal receiver a otevření grafu, ovšem tento nástroj podporuje funkci 2D graf - závislost 2 veličin.
Signál receiver
Nástroj pro zobrazení dekódovaných veličin s využitím EYE nebo DBC souboru. Data je možné zobrazit v grafu. V současnosti je však pro tyto situace efektivnější použít nástroj Data view. Ten však nepodporuje některé vlastnosti použitelné v tomto nástroji Signal receiver. Tím je konverze dat z logu CAN komunikace na veličiny, export veličin do souboru a Math parser receiver který dovoluje kombinovat více zpráv do sebe pro výpočet veličin.
Data view
Komplexní přehled o CAN zprávách, jak odesílaných tak přijímaných a zobrazení dekódovaných veličin v těchto zprávách obsažených pomocí definičního souboru EYE nebo DBC. Možnost zobrazení vybraných veličin v grafu.
Reply maker
Nástroj který dovoluje definovat automatické odpovědi pomocí jednoduchých pravidel na přijaté zprávy z CAN sběrnice.
Filtered log
Dovoluje filtrovat konkrétní zprávu (nebo až 3 zprávy) která se do okna loguje, případně definovat přijaté zprávy do logu pomocí masky nebo i datových bajtů, či filtrovat dle portu. Logovat lze odesílané i přijímané zprávy.
Grid log
Efektivní nástroj zobrazuje přijímané zprávy a zobrazuje které datové bajty se mění.
Timing accuracy
Měření periody a případně detekce a zalogování výpadku zprávy - nedodržení periody CAN zprávy.
Log filter
Tento nástroj dovoluje pomoci pravidel vyfiltrovat CAN bus log (trace komunikace) a získat pouze konkrétní sadu zpráv.
CAN Script
Skriptovací jazyk pro generování nebo zpracování CAN zpráv a jejich složitější zpracování. Případně pro vytváření řídící logiky, emulací zařízení a podobně.
Gateway
Nástroj pro přeposílání dat mezi dvěma CAN sběrnicemi.