For the USB2CAN Triple converter and the PP2CAN software, we are currently preparing a new CAN bus robustness testing tool for version 3.026. The ability to deal with a possible CAN bus fault is important for the robustness of the entire system. Errors can occur due to extreme interference (electric vehicles), aging wiring or other reasons. A robust system must be able to handle short-term communication failures correctly. For example, all CAN communication nodes must correctly handle the transition to the bus off state and the control software of the individual nodes must also correctly handle the communication and therefore data failure.
A new function added to the USB2CAN Triple converter allows switching CAN port 2 of the converter into a mode where the CAN dominant level can be inserted and the communication on the CAN bus disrupted.
This function is called Fault injector and so far includes 3 basic modes that can be further configured.
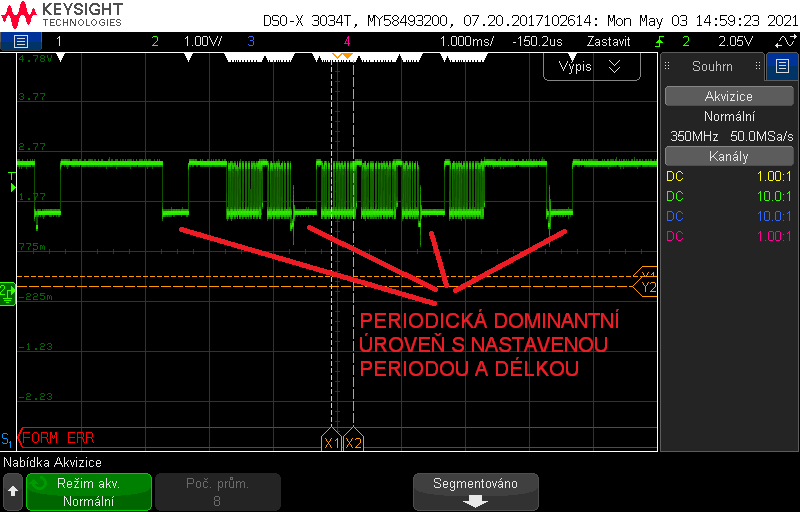
The first mode allows to periodically inject a dominant level on the CAN bus with a specified period and length of the dominant level.
Another mode is to insert an error into a CAN bus frame so that the error is inserted after a specified time has elapsed since the start of the frame was detected or the frame bit has transitioned to the dominant level. Subsequently, communication is not affected for the specified time and after this time has elapsed, the dominant level is inserted again as per the rule described above.

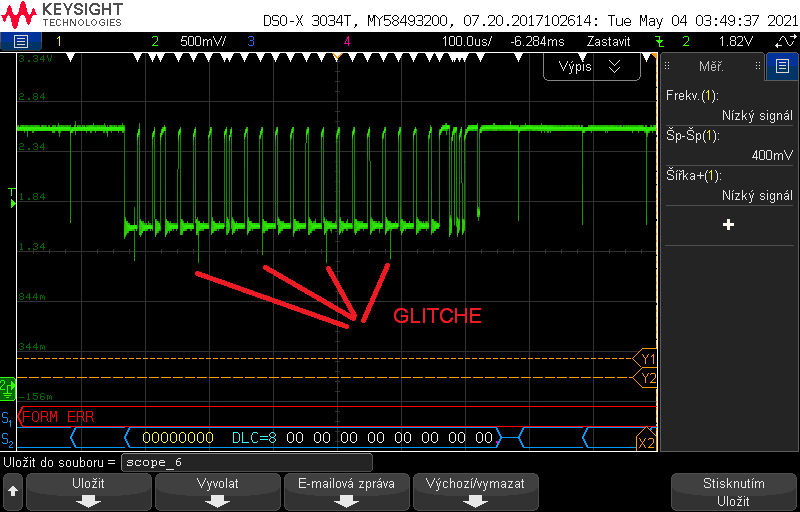
The third Fault injector mode inserts short glitches on the CAN bus. These glitches do not directly interfere with the communication if the CAN bus is OK, but they can nevertheless help in detecting errors, for example in case of a bad CAN bus topology.